1988年的某一天,机器人学家汉斯·莫拉维克得出一个著名结论:“让计算机在智力测试中或下棋时表现出成人水平相对容易,但让计算机拥有一岁婴儿的感知和行动能力却异常困难。”2026年的今天,这个被称为“莫拉维克悖论”的魔咒,正以一种新的形式困扰着具身智能产业。
我们看几组数据:
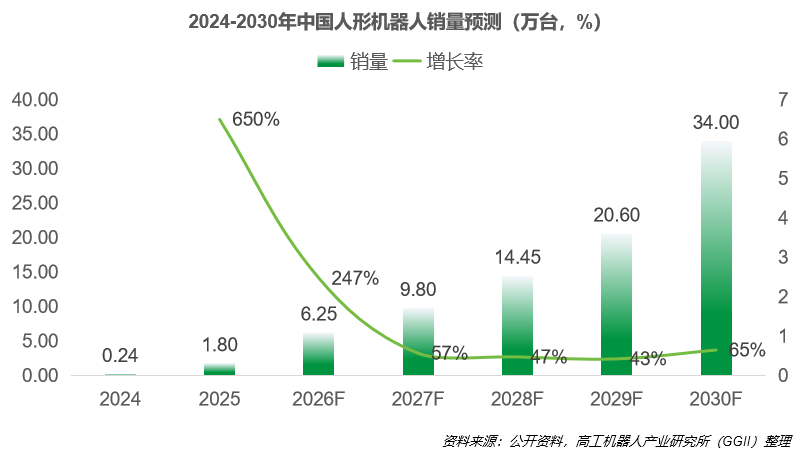
2025年,人形机器人行业用一年时间证明了自身的工程化能力——全球人形机器人出货量约1.8万台,其中,国内出货量占比超九成,同比增幅超过650%。GGII预计,2026年销量将达6.25万台。
资本的狂热令人侧目,仅2026年开年前两个月,赛道内融资额就逼近200亿元,智平方、自变量、千寻智能等接连迈入百亿估值的门槛,国内独角兽阵营迅速扩容至近10家。
3月初,银河通用宣布完成25亿元新一轮融资,刷新国内具身智能单轮融资纪录;同一天,松延动力完成近10亿元B轮融资。截至目前,今年赛道内已出现9起单笔金额10亿元及以上的融资,累计融资额突破373亿元,相当于每天有5亿元投向这个赛道。
头部效应愈发明显,2025年全年,融资排名前10的公司拿走了全年约40%的融资额。资金正在向具备量产、交付和商业化能力的企业集中,行业淘汰赛已然开启。
而另一组令人窒息的数据是,有分析显示,具身机器人训练大约需要数千亿级的交互数据,然而全行业现存数据却仅几百万条,存在10万倍的缺口。上海市数据科学重点实验室主任肖仰华教授也指出,训练具身智能大模型所需的多模态数据量,与当前已有数据量之间至少还差两个数量级。
越来越多的声音指向了一个看似传统、却在今年被赋予全新内涵的词——数据。如果2025年被定义为人形机器人的“量产元年”,那么2026年,行业共识正在向另一个维度聚集:具身智能的“数据元年”。
一个致命的软肋正在悄然制约着整个行业的发展:我们造出了能够奔跑、跳跃、翻跟头的机器人躯体,却发现它们的大脑依然像个饥饿的婴儿,急需大量真实世界的数据喂养。意识到数据瓶颈的严重性后,行业迅速掀起了一场数据采集的热潮。
3月,京东宣布启动人类史上规模最大的数据采集行动:计划一年内积累500万小时人类真实场景视频数据,两年内突破1000万小时,同步实现采集机器人本体数据100万小时。
为此,京东将发动数十万人参与数据采集,包括内部超过10万名各类职业员工,以及外部最多50万名各行业人员,覆盖家庭、办公室、工厂到物流、商店、餐厅、医疗、环卫等超百个细分场景。
不仅仅是京东。
帕西尼感知科技宣布将在江苏宿迁、湖北武汉、四川自贡、江西赣州新建4座超级数据采集工厂,与天津工厂一起覆盖华北、华东、华中、西南、华南五大核心区域,形成近百亿条高质量全模态数据产能。

智元机器人在上海建设了占地3000平方米的数据采集中心,自2024年9月启动以来,已累计采集超百万条高质量数据。北京石景山、四川自贡、广西柳州、江苏无锡、湖北武汉等地,均已成立具身智能数据采集中心。
这些数字背后是一个清晰的判断:数据采集正在从企业行为变成政府工程,乃至国家基础设施。
然而,热闹归热闹,一个根本性问题始终悬而未决:规模不等于质量,视频不等于有效数据。数十万人戴着采集设备逛超市、送快递,其产出的海量数据,固然能让机器人学会“什么是鸡蛋”,但却难以让它们知道“用多大力度捏住鸡蛋而不碎”。
回顾过去几年,行业经历了两次关键的数据觉醒。
第一阶段是预训练时代。大语言模型的成功,让行业意识到数据规模对于智能涌现的决定性作用。为了训练出通用的具身模型,从业者们开始海量收集数据,其中,仿真数据因其低成本、可复制的特性一度成为宠儿。
然而,现实很快给出了教训:仿真环境与物理世界之间存在一道难以跨越的鸿沟。在仿真里跑得再顺畅的抓取算法,一落地就可能因为摩擦力、材质软硬度的细微差异而出现问题。
第二阶段,即我们现在所处的“数据元年”。行业逐渐意识到,仿真只能解决泛化的上限,而无法提供“精准”的下限。要让机器人真正学会干活,必须依赖在真实物理世界中,由真人执行操作时采集的真实世界数据。这些数据,被行业视为具身智能模型的黄金燃料。
这引出了当前的核心点:并非所有数据都能平等地喂养模型。
在具身智能的数据生态中,一个金字塔结构已然成形——塔基是海量但缺乏物理交互信息的互联网视频,塔身是可控可生成却始终存在“仿真到现实”鸿沟的仿真数据,而位于金字塔顶端的,是极其稀缺、成本高昂、却最具价值的高质量遥操作数据。

这类数据直接来源于真实的物理交互,动作逻辑与力觉反馈高度一致,是训练具身智能模型价值最高、也最为稀缺的黄金燃料。
比如一个熟练的工人如何用螺丝刀感知螺纹的咬合,一个外科医生如何用镊子夹起脆弱的组织。这些微妙的感知,是任何程序预设或视觉模仿都难以还原的,唯有通过高保真的人机交互设备,将人类的手感以数据形式转录给机器人。
然而,当行业将目光投向遥操作时,一个现实问题摆在面前:什么样的遥操作方案,才能支撑起“数据元年”的产业野心?
答案藏在三个硬性要求里:高质量、可规模化、可持续。将这三个条件放在一起审视,VR遥操作和动作捕捉各有建树,却都无法独立撑起全局。
VR遥操作强在沉浸感与低门槛,操作者戴上头显即可进入机器人第一视角。但它的致命短板在于,手部动作采集完全依赖视觉追踪。一旦手指被遮挡或移出视野,精度便急剧下降,更遑论采集力度、触感这类“手感”数据。对于灵巧操作而言,这种信息断层是不可接受的。
动作捕捉技术则在全身运动领域难以替代,无论是光学动捕的精度还是惯性动捕的灵活度,都让它在机器人步态、舞蹈等大范围运动训练中占据主场。
但手部是另一套逻辑:关节密集、遮挡频繁、对力觉同步要求极高。动捕方案要么因标记点繁琐而难以规模化,要么因漂移误差而无法保证长期采集的一致性,规模化采集手部精细数据的成本至今居高不下。
而外骨骼遥操作,恰好填补了前两者在灵巧操作领域的空白。
它的核心逻辑是机械式物理连接,操作者的每一个手指弯曲角度、抓握力度等细微变动,都能通过连杆结构实时、无误差地传递给数据采集系统,同步记录精准的运动与力觉数据。无论是指尖对物体的毫米级微调,还是对鸡蛋的轻握与对扳手的重拧,外骨骼都能完整、保真地还原这一过程。

更重要的是,外骨骼同时满足了规模化与可持续的产业诉求。它无需复杂的场地改造,单人单设备即可完成采集,学习成本低,硬件耐用性强,数据格式统一,能够形成“采集—训练—迭代—再采集”的良性闭环。
这正是数据元年对基础设施的终极期待:不是实验室里的精密仪器,而是可以复制、可以铺量、可以持续运转的工业化工具。
MIT的权威研究为此提供了佐证,其开发的DEXOP被动式外骨骼系统,通过机械连杆将人手与被动机器人手直接连接,实现了力觉的透明传递。在对比实验中,用户使用DEXOP完成装灯泡、打包纸盒等任务的数据采集效率,比传统遥操作高出7到8倍。
原因在于,操作者能通过机械连杆直接感受到接触阻力和剪切力变化,从而更自然、更快速地完成任务,采集到的数据也更为干净、接近人类的真实策略。
三条路径本无绝对优劣,只是站在“数据元年”的节点上,行业对数据采集的刚需,正将外骨骼从一种技术选项推向了必然路径。它并非取代VR在沉浸式环境交互、或动捕在大范围运动学习中的价值,而是在灵巧操作这个对精度、力觉和多模态同步要求极高的核心领域,确立了自身不可替代的地位。
显而易见的是,当数据元年的浪潮袭来,谁能在数据采集的核心技术路径上占据定义权,谁就能在下一阶段的竞争中掌握主动权。而在这场数据攻坚战中,一类独特的参与者身影逐渐清晰——灵巧手本体厂商。他们既是数据的需求方,更是数据采集核心技术方案的提供者。
作为一家从灵巧手硬件起家的公司,灵巧智能最初切入点是灵巧手本体,但在开发过程中,团队发现了更上游的瓶颈:数据从哪里来?
不同于直接下场建设大型数据采集工厂,灵巧智能选择了一条更贴合自身基因的路径——成为数据采集工厂背后的核心技术供应商,为规模化数据采集提供关键设备与解决方案。于是,外骨骼数据采集系统成为了他们的核心产品之一。
这一战略定位,正是产业分工从粗放式自采向专业化分工迁移的一个行业缩影。
一个从灵巧手干起的团队,对于“什么样的数据对手是好用的”有着先天且深刻的理解。灵巧智能认为,机器人的操作智能核心在于接触,不仅关乎手部状态与被操作物体,更与手-物接触关系,尤其是“接触力”信息密切相关。这种对操作本质的洞察,直接影响了其数据采集方案的设计哲学。

基于此,灵巧智能推出了DexCap外骨骼遥操作数据采集系统。该系统延续了外骨骼的机械传动逻辑,支持双手各21个自由度的手指动作捕捉,单臂9个自由度的位姿追踪,以及腰部5个自由度的运动监测,整体响应频率高达1000Hz,实现了毫米级的操作精度。操作员穿上后,手指的每一次弯曲、捏合、旋转,都能被实时、高保真地映射并记录。
DexCap的设计体现了其作为本体厂商的独特站位——它离手最近,最懂数据该长什么样。“硬件制造商”与“数据核心技术方案定义者”的双重身份在这里巧妙地结合了。
由于深谙灵巧手的机械结构、运动学限制和力控需求,其采集的数据格式与维度能更精准地匹配下游模型训练的要求,减少了不必要的数据转换与信息损失。
他们不是从软件或算法的角度去想象数据,而是从硬件的物理极限、传感器分布、驱动逻辑出发,去定义什么是对灵巧手“有用”的数据。这也决定了灵巧智能与各大数采厂之间天然的协作而非竞争关系:数采厂聚焦于场景运营与数据规模,灵巧智能则为其提供高精度、高可靠性的数据采集核心设备。
据介绍,DexCap目前已走出实验室原型机阶段,成为产品化、推向市场的解决方案。其整机重量控制在4.2公斤以内,单次充电续航可达8小时,并提供了标准的SDK和API接口,旨在成为研究人员和工程师开箱即用的数据采集工具。
更为重要的是,灵巧智能在推动一种“数据与硬件协同”的思路。这并非一句口号,而是贯穿其产品矩阵与技术路线的底层方法论。在团队看来,数据采集不应是硬件的外挂或事后补救,而应是系统设计之初就统筹考虑的一部分。
这种思考的独特性首先究就体现在需求前置上。在行业惯例仍是“先造手、后想数据”时,灵巧智能团队反其道而行,在DexCap外骨骼的机械机构尚未定型之前,先追问“若要教会AI理解拿、捏的微妙力学,传感器该如何分布?采样频率需达到什么阈值才能捕捉指尖的毫米级震颤?”
这些问题的答案被写入硬件的底层架构——如前文提到的亚毫米级精度、1000Hz响应频率等,这些数字不是性能炫耀,而是力觉模型训练的最低数据门槛。
其次便是体现在闭环验证上。DexCap采集的不仅是动作轨迹,更是对自身硬件能力边界的持续探索。
在构建DexCanvas数据集的过程中,团队遭遇了一个行业共性难题:纯视觉捕捉无法还原力的维度。他们的解决方案并非简单加装传感器,而是通过轨迹反推力学的方法,将采集到的真实动作轨迹置入物理仿真环境,让AI尝试复现,进而推导出力觉的信息。
更深层的意图在于能力边界的预设,2025年开源的DexCanvas数据集,打破了数据垄断,建立基础设施,让灵巧操作从一个封闭的技术高地,变成了所有开发者可以共同构建的开放生态。
显然,“数据与硬件协同”的本质是将数据采集核心技术方案的研发视为与硬件研发同等重要的基础设施,通过定义高质量的数据采集路径,反向驱动硬件朝着更易学习、更易数据化的方向演进。这已不仅仅是一场技术路线的争论,更是关乎行业标准与生态位构建的深层博弈。
行业共识正在微妙地形成:2026年是数据元年,而外骨骼是现阶段灵巧手数据采集的必然路径。这一共识一旦建立,将带来一系列连锁反应。
对投资界而言,将更关注具备核心数据采集技术能力的标的,而非单纯的本体制造能力或单一的场景运营能力;对科研界而言,将更倾向于采用外骨骼等高保真设备构建自有数据集,而非依赖开源的仿真或低质量视频数据;对产业界而言,将加速“数据即资产”的观念落地,数据采集核心设备有望成为继机器人本体之后的又一关键硬件赛道。

2026年,具身智能的故事主线,已经从硬件的从无到有,转向了数据的从有到优。数据元年的开启,意味着行业竞争进入深水区。在这里,比拼的不再是谁能造出更多关节的灵巧手,而是谁能以更高效、更经济的方式,为这些“手”注入真正的灵魂——基于海量高质量数据训练出的操作智能。
外骨骼路径,凭借其在数据质量、规模化潜力与可持续性上的综合优势,正成为破解灵巧手数据荒的关键钥匙。它并非要取代VR在沉浸式环境交互、或动捕在大范围运动学习中的价值,而是在灵巧操作这个对精度、力觉和多模态同步要求极高的核心领域,确立自身不可替代的地位。
而像灵巧智能这样的本体厂商,以其对硬件与数据协同的深刻理解,正从灵巧手硬件供应商,转变为行业数据核心技术方案的定义者与赋能者。他们的实践揭示了一个趋势:在具身智能时代,硬件与数据的边界正在模糊。最好的硬件,是易于产生优质数据的硬件;最好的数据采集方案,是源于对硬件深刻理解的方案。
那个关于“计算机可以击败国际象棋冠军,却难以拥有一岁婴儿感知能力”的哲学诘问,我们或许正处在见证它逐渐消融的历史时刻。
历史可考的是,多年前,当新能源车企纷纷押注增程、纯电技术路线时,很少有人能准确预测最终的市场格局。今天的人形机器人行业,正站在相似的十字路口。技术的收敛,往往是由系统中最短的短板决定的。2026年,通往通用灵巧操作的道路,将由无数条高质量的数据轨迹铺就。而通过外骨骼采集的高质量数据,正成为那根决定胜负的最短木板。













 京公网安备 469023020002510号 |
京公网安备 469023020002510号 |